
![supercon-2023:-jesse-t.-gonzalez-makes-circuit-boards-that-breathe-and-bend-[hackaday]](https://i0.wp.com/upmytech.com/wp-content/uploads/2024/07/198275-supercon-2023-jesse-t-gonzalez-makes-circuit-boards-that-breathe-and-bend-hackaday.jpg?resize=800%2C445&ssl=1)
Supercon 2023: Jesse T. Gonzalez Makes Circuit Boards That Breathe and Bend [Hackaday]

Most robots are built out of solid materials like metal and plastic, giving them rigid structures that are easy to work with and understand. But you can open up much wider possibilities if you explore alternative materials and construction methods. As it turns out, that’s precisely what [Jesse T. Gonzalez] specializes in.
Jesse is a PhD candidate at Carnegie Mellon’s Human-Computer Interaction Institute, and an innovator to boot. His talk at the 2023 Hackaday Supercon covers his recent work on making circuit boards that can breathe and bend. You might not even call them robots, but his creations are absolutely robotic.
Be Flexible

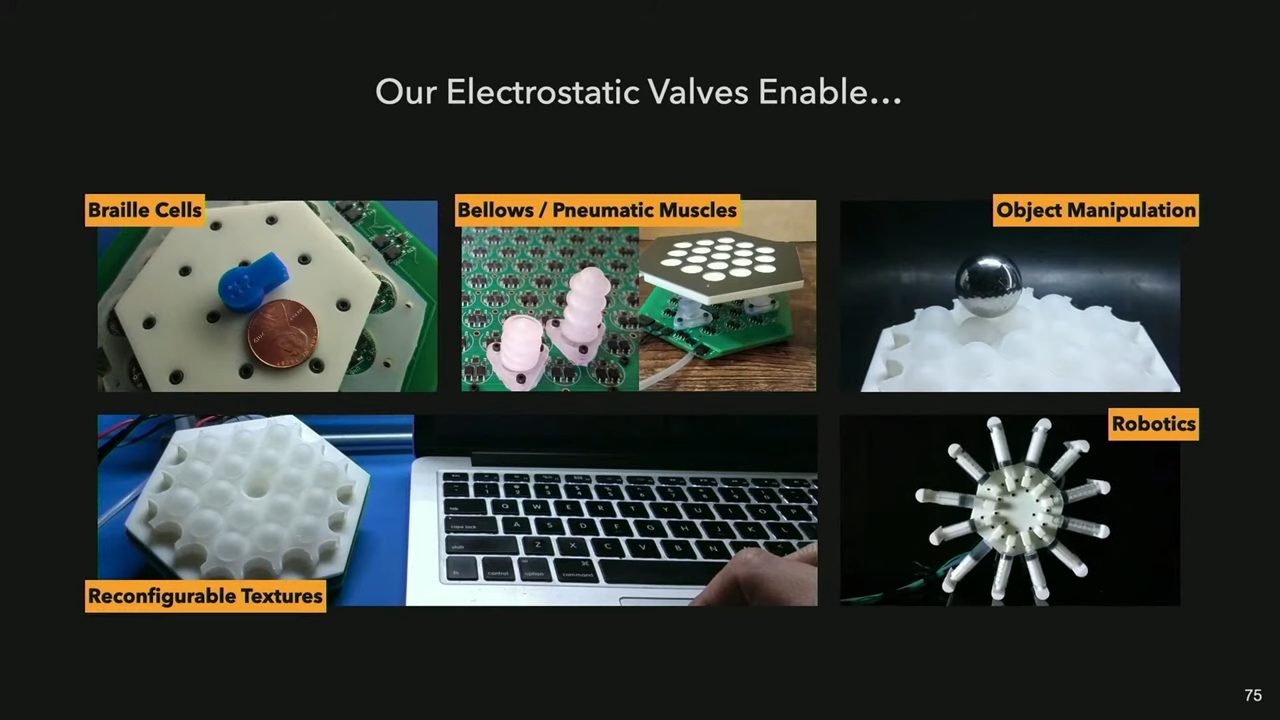
Jesse begins by teaching us about robotic surfaces. He shows us a demonstration video, in which a metal ball is juggled around on a silicone bubble surface. Typically, we might model robot actuation in our heads as involving simple grippers on the ends of industrial robot arms, but that’s a limiting view. As the demo shows, even a surface itself can be robotic, and can be used to generate textures or manipulate objects, for example.
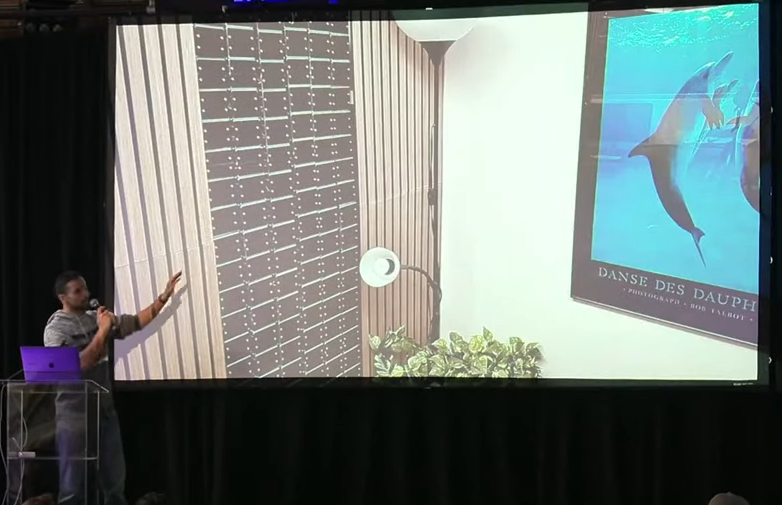
In his own apartment, Jesse has taken this idea a step further—creating the idea of a robotic environment. At his home, he walks in the door and is greeted by his robotic wall, which extends out to create a shelf for his shopping. Another part of the wall steps up to act as a coat hook. His very home itself has become roboticized to help ease his tasks of daily living.
He draws comparison to the Disney movie Encanto, which depicted a very house itself that was alive. And so many other films have shown us similar over the years. Walls that transform to reveal hidden doors, transforming desks and chairs and the like. Typically, these concepts are the preserve of mere cartoons, but there’s value in exploring whether we could make these things a reality.
He notes that building large interactive surfaces can be quite difficult, and that he didn’t produce this complex structure overnight. He returns to the example of the roboticized silicone bubble surface. Building a large bubble surface requires using a solenoid for each bubble section you want to actuate, he explains. This doesn’t scale well. However, if you could instead make a printed circuit board that featured the valves as an integral component, that would greatly simplify the assembly. Producing a larger PCB with more integral valves would be much simpler then endlessly wiring up more discrete valves.
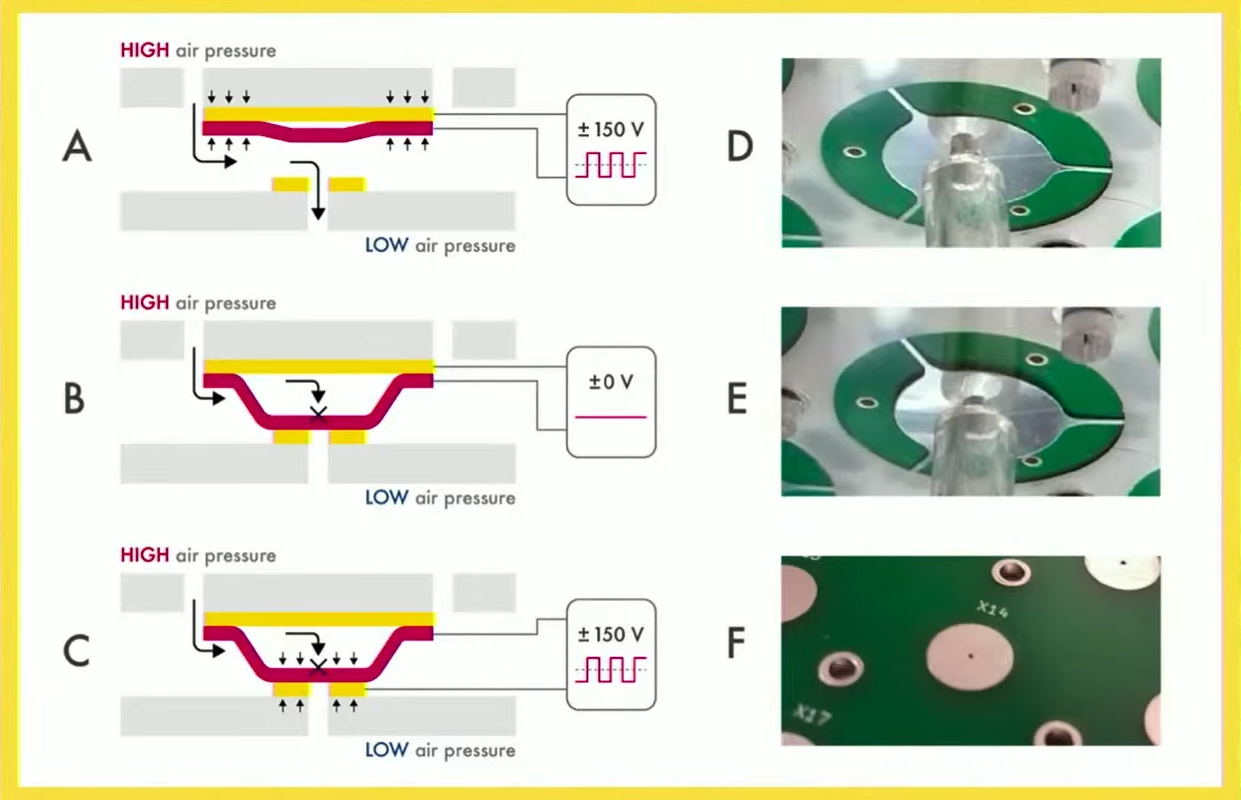
In Jesse’s pneuamtic bubble demo build, the valves work by electrostatic action, with a structure consisting of a PCB with electrodes and a conductive diaphragm. With no voltage applied, the valve is shut. Applying voltage across the PCB electrode and the diaphragm pulls the valve open, letting air through. Voltage can also be applied to an alternate electrode to attract the diaphragm the other way, sealing the valve shut. The valves operate with an actuation voltage of a few hundred volts, and can switch in 40 milliseconds or so.
The system was originally developed with the electrostatic diaphragm to act as a “lid” on a pressure port. However, the electrostatic force wasn’t strong enough to keep the simple valve design shut. Jesse realized flipping the design on its head was the way to go. Instead, the valves are naturally sucked closed by vacuum on the system. They can then be pulled open via electrostatic actuation.
The PCB-based assembly method allowed creating complex arrays of valves that could actuate all kinds of things. Examples demonstrated by Jesse include the aforementioned bubble surface, as well as a “wheel” that walks with pneumatically-actuated syringes.
Leaving The Plane
Jesse’s initial work in this space was all very planar. No surprise, given the PCBs he was using were rigid. However, he wanted to “leave the plane” to explore more complex geometries. With his collaborators Dr. Scott E. Hudson and Dr. Alexandra Ion, he figured that combining rigid plates with hinge joints was an easy way to create more three-dimensional structures through folding. Again, PCBs were at the heart of this work.
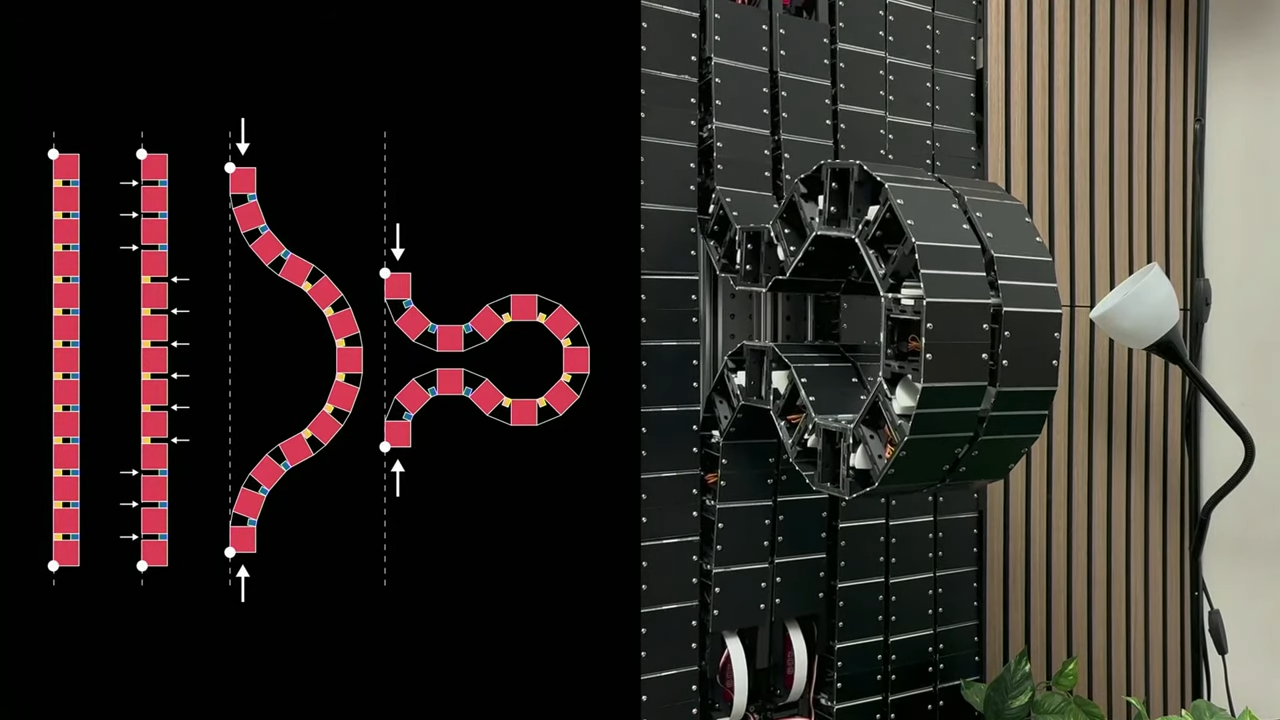

The group wanted to explore this concept on architectural scales, imagining ideas like walls that could transform their entire form into new useful shapes. In time, they developed a wall surface with multiple columns, each composed of individual rigid cells that join to their neighbor with hinges. By the cells changing their orientation relative to each other, the whole column can change its shape. The cells are made of rigid plates of FR4. Each cell is joined to its neighbor with a semi-circular clamp actuated by a servo, flexible mylar hinges, and flat flex cables for electronic connections. By altering the orientation of the clamp, the cells can lock together in a rigid orientation, or allow the hinges to flex in a mountain or valley orientation.
For now, actuating the wall columns is mostly handled with pre-scripted actions. However, Jesse believes capacitive sensing or other technologies could make the wall more effortlessly interactive. In any case, even at its current level of sophistication, the living wall structure is serving as an excellent talking point in Jesse’s apartment.
Fundamentally, Jesse’s techniques are all about using PCBs in ways that make it easy to assemble adaptive structures at scale. It’s like taking a look at the nascent technology that seems to show up in so many science-fiction movies, where rooms and furniture seem to bend and change to their owner’s will. Perhaps one day, that could be more of a reality with techniques like these.