
![soft-robotic-system-for-in-situ-3d-bioprinting-and-endoscopic-surgery-[hackaday]](https://i0.wp.com/upmytech.com/wp-content/uploads/2023/04/119832-soft-robotic-system-for-in-situ-3d-bioprinting-and-endoscopic-surgery-hackaday.jpg?resize=800%2C445&ssl=1)
Soft Robotic System for In Situ 3D Bioprinting and Endoscopic Surgery [Hackaday]
The progress of medical science has meant increasingly more sophisticated ways to inspect and repair the body, with a shift towards ever less invasive and more effective technologies. An exciting new field is that of in situ tissue replacement in a patient, which can be singular cells or even 3D printed tissues. This in vitro approach of culturing replacement tissues comes however with its share of issues, such as the need for a bioreactor. A more straightforward approach is printing the cells in vivo, meaning directly inside the patient’s body, as demonstrated by a team at the University of New South Wales Sydney with a soft robot that can print layers of living cells inside for example a GI tract.
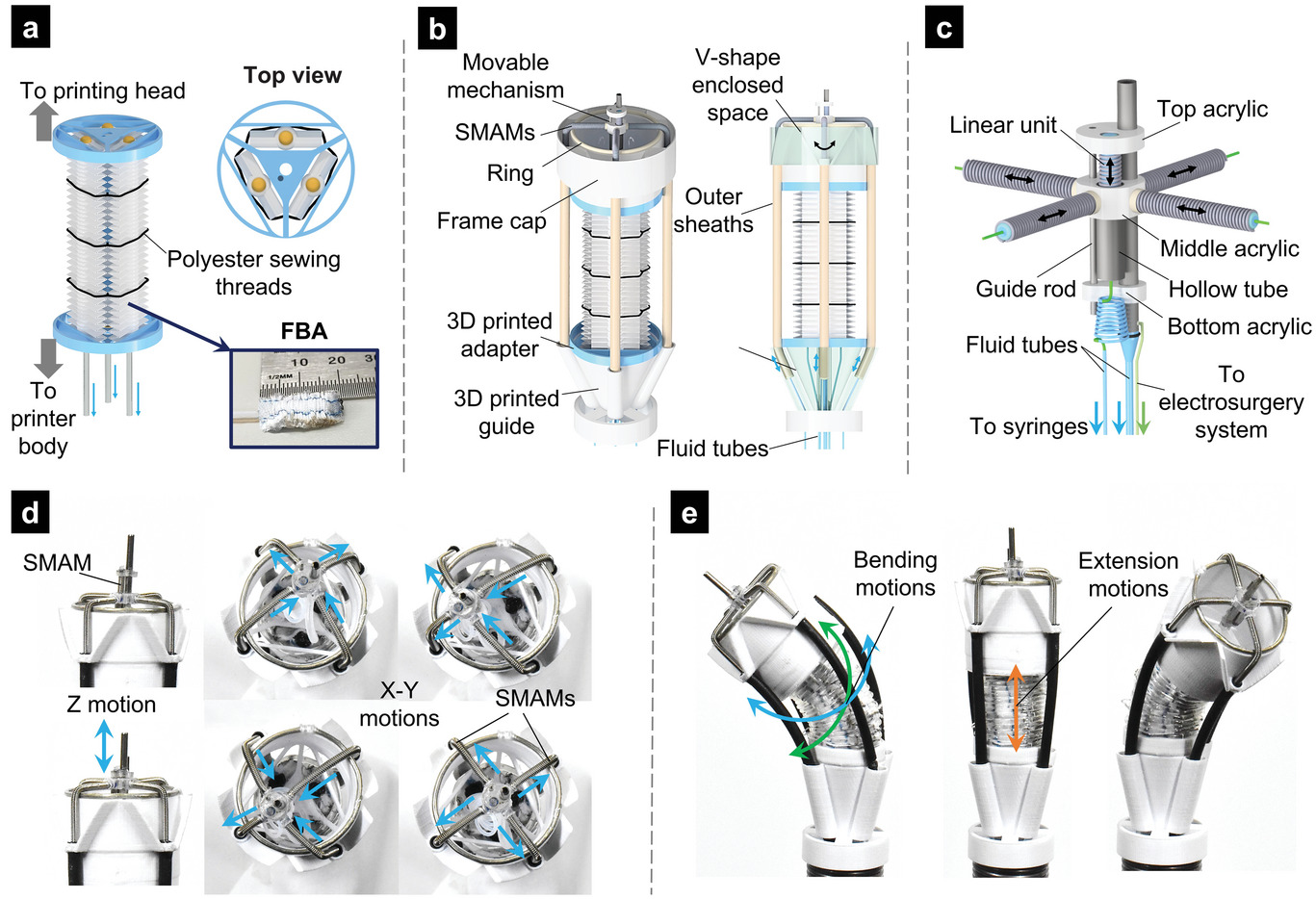
In their paper, the team — led by [Dr Thanh Nho Do] and PhD student [Mai Thanh Thai] — describe the soft robot that is akin to a standard endoscope, but with a special head that has four soft microtubule artificial muscles (SMAM) for three degrees of freedom and fabric bellow actuators (FBA) that provide the motion desired by the remote controller. The system is configured in such a way that the operator inputs the rough intended motions, which are then smoothed by the software before the hydraulics actuate the head.
In a test on a simulated GI tract, the researchers were able to manipulate a prototype, and deposit a range of materials from the installed syringes. They envision that a system like this could be used as with endoscopes and laparoscopy to not only accurately deposit replacement cells inside the patient’s body, but also to perform a range of other surgical interventions, whereby the surgeon is supported by the system’s software, rather than manipulating the instruments directly.