
![rocker-bogie-suspension:-the-beloved-solution-to-extra-planetary-rovers-[hackaday]](https://i0.wp.com/upmytech.com/wp-content/uploads/2023/09/142338-rocker-bogie-suspension-the-beloved-solution-to-extra-planetary-rovers-hackaday-scaled.jpg?resize=800%2C445&ssl=1)
Rocker Bogie Suspension: The Beloved Solution To Extra-Planetary Rovers [Hackaday]
When navigating the vast and unpredictable expanses of outer space, particularly on the alien terrains of distant planets, smart engineering often underlies every major achievement. A paramount example of this is the rocker bogie suspension system. It’s an integral component of NASA’s Mars rovers and has become an iconic feature in its own right. Its success has seen the design adopted by the Indian space program and thousands of hobbyists in turn.
So, what exactly is it that makes rocker bogie suspension such a compelling design solution? Let’s dive into the engineering that makes these six-wheeled wonders so special.
Rock Yo’ Bogies
 The rocker-bogie layout easily handles rough terrain. This animation is simplified; in reality, the chassis, pictured in blue, would tilt with the average angle of the two rocker arms. Credit: Facepunch, CC BY-SA 3.0
The rocker-bogie layout easily handles rough terrain. This animation is simplified; in reality, the chassis, pictured in blue, would tilt with the average angle of the two rocker arms. Credit: Facepunch, CC BY-SA 3.0What’s great about the rocker-bogie design is that NASA isn’t afraid to share what makes it great. Part of the magic of the rocker-bogie layout is its simplicity. This innovative design omits the use of springs or shocks. Instead, picture a mechanical linkage that involves pairs of arms, termed as ‘rockers’, one on each side of the rover. These are connected with a differential pivot linking the left and right sides together. The rockers have a wheel at one end, and a “bogie” of two wheels that can pivot relative to the rocker at the other end. This basic six-wheeled layout is all there is to the rocker bogie system.
The brilliance lies in the differential’s ability to control the way the rover sits on the terrain. Due to the action of the differential between the left and right side of the rover, as one side of the suspension is pushed up, the opposite side is pushed down. This naturally spreads the load of the vehicle across all six wheels, which minimizes the maximum ground pressure on any one wheel. This is particularly desirable when traversing soft terrain, where excess ground pressure on one wheel can lead to it sinking into the ground. The differential action also keeps the rover relatively level, with the chassis maintaining an angle the average of the two rocker arms.
 100vw, 312px”><figcaption class=) The Spirit and Curiosity rovers use a geared differential linking the left and right rocker-bogie assemblies. Credit: NASA
The Spirit and Curiosity rovers use a geared differential linking the left and right rocker-bogie assemblies. Credit: NASA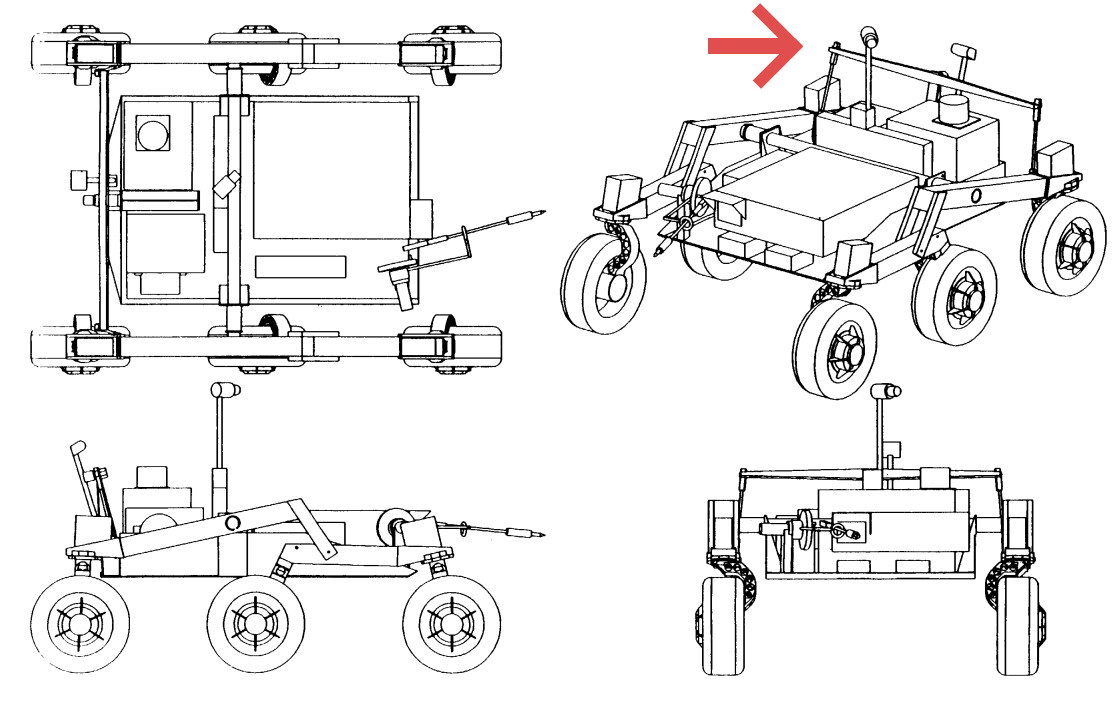
A major advantage of this design is its remarkable ability to scale obstacles up to twice the wheel’s diameter while still keeping all six wheels on the ground. This capacity allows duly-equipped rovers to effortlessly handle considerable boulders or fissures on rough terrain, while reducing the chances of getting stuck or losing traction. When approaching a vertical obstacle, a rocker-bogie rover first presses its front wheels against the obstacle. As the front wheel rotates, it lifts the wheel up the obstacle, and then crests it and rolls over. The middle wheel then does the same, with the bogie pivoting in turn, before the rear wheel completes the same journey. Forward progress is slow during such a maneuver, but a rocker-bogie rover can steadily work its way over these obstacles in a way altogether unfamiliar to other vehicle designs.
In NASA designs, it pairs the rocker-bogie suspension with high-torque actuators in the wheels. Combined with the suspension’s ability to keep all six wheels on the ground under most conditions, it provides the rover plenty of motive force to propel itself forward over even difficult obstacles. This also means that if a wheel or two are elevated or find themselves in a sandy pit, the rest can adeptly compensate, ensuring the rover continues its journey without hindrance. In the relentless and unpredictable Martian realm, this quality is invaluable, especially when a stuck rover could equate to a mission’s premature end.
The sheer simplicity and sturdiness of the rocker bogie system, with its avoidance of springs or shock absorbers, are commendable. This uncomplicated design translates to fewer components that could malfunction, offering resilience perfectly tailored for Mars’s challenging environment. Having less mechanical parts that can get clogged with dust, fatigue, or wear, is of huge benefit when your rover is on another planet far beyond any maintenance help.
Roger Cheng’s Sawppy rover uses a rocker-bogie suspension design. Here, it demonstrates the suspension’s ability to tackle high obstacles.
The one area in which the rocker bogie design doesn’t really excel is in speed. NASA’s fastest Mars rover is Perseverance, with a top speed of around 0.12 km/h. As a guide, walking pace is a comparatively blazing 4 km/h. The slow speed is somewhat justified by the fact that there’s a huge time delay between Earth and Mars, making fast travel difficult to control. At the same time, the slow nature of the rovers helps reduce the mechanical complexity. The faster a vehicle travels, the greater the shock loads. Reducing shock loads by reducing speed reduces the need for dampers.
 100vw, 400px”><figcaption class=) NASA pioneered the rocker-bogie design for its Mars rovers. Credit: NASA JPL
NASA pioneered the rocker-bogie design for its Mars rovers. Credit: NASA JPLThe rocker-bogie system has been copied many times over, a true testament to its engineering value. The Indian Space Research Organisation (ISRO) chose this very suspension system for its Pragyan lunar rover, which landed on the moon as part of the Chandrayaan-3 mission. The rover has ably navigated the difficult lunar surface without major incident.
Similarly, many makers have put the design to good use, with Roger Cheng’s Sawppy rover a great example of the form. The design demonstrates excellent obstacle climbing abilities. That’s due to Roger’s hard work in building a proper implementation of the rocker bogie design, with the crucial differential link between the two sides of the rover. Many builders of homebrew rovers try to replicate the six-wheeled design, but miss this key feature. It’s understandable, given the mechanical complexity of implementing the differential link, but a rover without it gives up some ability in turn.
(Editor’s note: On the day we’re publishing this, a new version of the NASA-JPL Open Source Rover hit our inbox! Check it out.)
If you find yourself hard at work in a government or private space program, and you need to build a rover, consider the benefits of the rocker-bogie design. If you’re going anywhere soft, bumpy, rocky, or treacherous, it could be the solution you need.